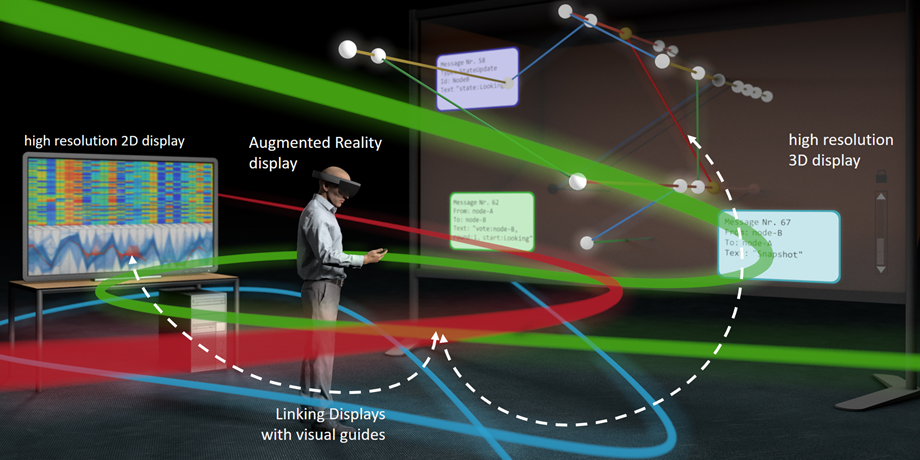
Project E4 focuses on CPS scenarios where spatio-temporal concepts like distance, orientation, velocity, and visibility play an important role, and where a large number of variations is central. E4 conducts research on 1) multi-agent scenarios with autonomous CPS agents, where visual inspection tools facilitate the analysis of sensors and communication channels as well as spatial relationships among agents; 2) the visual analysis of discrete state space scenarios, in particular closing the system lifecycle loop by re-training neural action policies triggered and informed by visual inspection; 3) exploiting immersive technology for real-time human oversight and for designing future control centres, utilising novel and optimised streaming visualisation approaches.
Principal Investigators


